One had to put his mouth very close to the transmitter,
speak very slowly, very loud,
and about very ordinary things,
otherwise the meaning of the transmitted intelligence
would not be caught at all.
M.I. Pupin---Wave Transmission Over Non-Uniform Cables
and Long-Distance Air-Lines
|
|
| Michael I. Pupin |
The properties of these lines were further investigated by George A. Campbell. In 1903 he published some findings [2], among which a peculiar frequency-dependent effect of Pupin lines, namely that they have a well-defined critical frequency that marks a sudden change in the damping characteristics. Below this frequency the damping is low, and dependent only on the parasitic cable losses. If these losses are zero, the damping below the critical frequency is also zero. Above the critical frequency the damping is high, and almost independent of the cable losses. The transition at the critical frequency can be very sharp. The critical frequency itself is determined by the spacing of the coils and corresponds to a wave length equal to twice the distance between them.
This effect was used to answer the question of how many coils are to be inserted in a given length of cable, but it was also immediately clear that this effect could be utilized, and Campbell pointed out that he used this effect to eliminate harmonics in signal generators. In fact he used the cable as a lowpass filter, and he even mentioned the possibility of using the cable as a bandpass filter by replacing the coils by combinations of coils and capacitors.
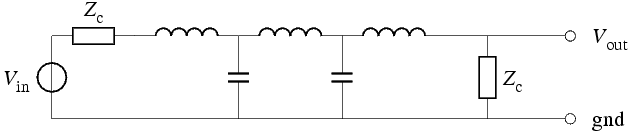
A reel of cable is very large and therefore somewhat unwieldy as a filter, but the next step was so logical that it was undertaken independently in the same year (1915) in Germany by Karl Willy Wagner [3], and in America by Campbell [4]. The line was simulated by a ladder construction of impedances, an instance of which is shown in Figure 1.

|

|
| Karl Willy Wagner | George A. Campbell |
In general, wave filters after Wagner and Campbell can consist of any number of sections, which consist of three impedances and can be of the T-type or of the Π -type. These types are shown in Figure 2.
The example of Figure 1 consists of two sections of the T-type. The sections in a wave filter were chosen identically, so that the filter represented a homogeneous line.Usually, for the impedances, reactances were chosen. This could result in highpass, lowpass, bandpass or bandstop filters, or even filters with any number of disjunct passbands. The filters were to be terminated at both sides with their characteristic impedance Zc , as shown in Figure 1.
To design these filters, the filter impedances were to be constructed as combinations of inductances and capacitances. Design methods were developed by several people, under whom Otto J. Zobel has a prominent place, because in 1923 he introduced a strategy that allowed the design of filters with an unlimited number of capacitances and inductances [5]. One of his inventions was the m -type derived filter, which simplified the design of complicated filters, because these could be derived from relatively simple filters. Figure 3 shows an example
of an m -type filter that has been derived from the filter of Figure 1. An m -type derived filter has the same passbands and stopbands, and also the same characteristic impedance as the filter it has been derived from. The differences are in the attenuation characteristics. The transfer function of the filter of Figure 1, for instance, is zero only at infinite frequency, whereas the transfer of the derived filter is zero at a finite frequency, and is nonzero at infinite frequency.Zobel also initiated the use of `composite wave filters', which are wave filters that contain sections that differ from each other in propagation properties, but should have matched characteristic impedances.
The design theory of this type of filter bore the heritage from the transmission-line theory and was expressed in terms of characteristic impedances that should be matched if stages were cascaded, and wave-propagation constants that were used to describe the attenuation characteristics of the filter. As a first-order approximation, it was usually assumed that the filter was terminated by its characteristic impedance at all frequencies, which is not practically possible, because the characteristic impedance varies with frequency. In theory, this assumption always gave rise to flat passbands in which--apart from parasitic losses--no damping at all occurred. Variation of the attenuation in the passbands was regarded as a parasitic effect due to frequency-dependent mismatch. The mismatch was worst near the band limits of the filter, which usually resulted in large transmission peaks at those sites.
This filter theory was called the `image-parameter theory' by Sidney Darlington [6]. It has been described in a comprehensive and clear manner by M. Reed [7]. This theory was advantageous for designing complicated filters with a large number of sections. The exact attenuation characteristic of a filter that consisted of a large number of stages, and was terminated in a fixed resistance, was very difficult to determine, and still much more difficult to design. Therefore one had little control over the transmission characteristics in general and the transfer irregularities near the band limits in particular.
This problem was solved by S. Butterworth by splitting the filter in sections of order maximally equal to four, and separating these sections by amplifiers (constructed with tubes), so that there was no interaction between the separated parts, and the transfer function of the filter could be well designed [8]. In this way he was able to construct filters with the famous and well defined maximally-flat transfer functions that were named after him. His work was published in 1930.
The work of Butterworth is unique in several ways, because he was one of the first to deviate from the image-parameter theory and accurately designed for transfer functions. Furthermore, he made the first active filters.
In approximately the same period in time, William R. Bennett solved the problem of designing (passive) ladder filters of any order with a maximally-flat transfer function [9]. Although Bennett used the traditional wave filters as a starting point in his designs, he deviated from the filter theories of that time, because his filters consisted of sections that differed from each other and were not matched in characteristic impedance, and he remarked that the operation of his filters ``cannot readily be analyzed in terms of the ordinary filter theory''. According to Mumford [10], Bennett used maximally-flat functions before Butterworth did.

|
| Wilhelm Cauer |
Also Darlington used Chebyshev approximations in his `insertion-loss theory', which he published in 1939 [6]. This theory was intended as an alternative to the image-parameter theory and made it possible to accurately design the transfer function of the filter.
The work of Cauer and Darlington is generally regarded as an important breakthrough in filter synthesis, although in their days the computational burden involved was so high that their theories had limited use. Moreover, these theories, as they were formulated, had few connections with practice, which made them unpopular. Nowadays, computational cost is low, and designing a filter with use of the insertion-loss theory amounts to little more than copying numbers from a table, or invoking a computer program, which is easier than using the image-parameter theory.
Filters were realized as networks of inductors, capacitors, and resistors. It was recognized that the quality factor of the inductors was generally far less than of the capacitors, especially at low frequencies. In a number of applications, inductors with a sufficient quality factor were large and expensive, while high-quality capacitors were relatively small and cheap. The filter transfer functions that can be realized with capacitive and resistive elements only have their poles on the negative real axis of the complex Laplace plane. Complex poles are realizable if active circuits are added. This gave rise to the use of active RC filters [13].
A general design method for active RC filters has been proposed by R.P. Sallen and E.L. Key [14]. Although they indicated how sections of any order could be realized, in their synthesis procedure they proposed the realization of an active filter as a cascade of passive first-order sections and active second-order sections. It was possible to realize the second-order sections with just one active stage per section, which was important because active stages were expensive. Figure 4
 |
The cost of active stages made the use of active filters unpopular. This changed after silicon integrated-circuit technology was introduced, and in the late 1960's cheap integrated operational amplifiers became available. Integrated amplifiers were used in combination with discrete resistors and capacitors.
The resistors and capacitors were also realized in thin-film technology, on a unit to which the opamps were added later. For the design of these hybrid filters the methods of Sallen and Key were often used [15,16], but also state-space-like configurations, which require more amplifiers for the realization of a given transfer function, were exploited [17].
A new development came when it became possible to integrate capacitors and resistors of reasonable quality together with active stages on a single chip. The capacitors were small, and, consequently, to realize the time constants that were necessary in the larger part of the frequency range these filters could be designed for, the resistors were to be large. These resistors could be realized but they consumed large amounts of chip area. A larger problem was the accuracy with which the time constants could be realized. A time constant is the product of a capacitance and a resistance, and both the capacitors and the resistors on a chip had a low accuracy, which resulted in time constants with an inaccuracy of about 20%. For both problems, two different solutions were found.
The first of these was the simulation of a resistor by a switched capacitor [18,19] (1977). If a capacitance of value CR is periodically switched at a clock frequency fs , a resistor with value 1/(fsCR) is simulated. If this resistor is used in combination with an integrating capacitor Ci , a time constant Ci/(fsCR) is obtained. This time constant is only dependent on the clock frequency and a ratio of capacitances. A clock signal with a very accurate frequency can be obtained from a crystal oscillator, and a capacitance ratio can be accurately realized on a chip, although the capacitances themselves usually are not very accurate. Therefore in this way accurate time constants can be realized on chip.
The other solution was given in 1978 by Khen-Sang Tan and Paul R. Gray [20]. The filter was realized as a network of integrators, the time constants of which were made voltage controllable, so that the filter was tunable. In this way the filter could be combined with an automatic tuning circuit on the same chip. This tuning circuit used an on-chip two-integrator voltage-controllable oscillator, built up with integrators that were matched with the integrators that were used in the filter, and were fed by the same tuning signal. The frequency and the phase of the output signal of the on-chip oscillator were locked to those of an externally supplied reference signal by means of a phase-locked loop. The time constants of the integrators of the oscillator, and thus by matching also the time constants of the integrators of the filter, were in this way related to the period time of the reference signal, and consequently could be accurately realized.
The tunable integrators were each realized as a tunable transadmittance stage in combination with a fixed capacitor, as shown in Figure 5(a).
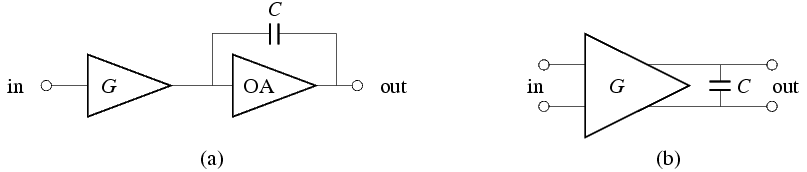 |
A similar approach with a bipolar realization was introduced in 1980 by Kenneth W. Moulding [21]. The filter, which had been published before, in 1978, [22], consisted of a network of transadmittance-capacitance integrators of the type shown in Figure 5(b), although the discussion of Moulding was in terms of gyrators. The transadmittance stages were based on a resistor-degenerated bipolar differential pair. The degeneration resistors determined the time constants together with the capacitances. Due to the high frequencies that were involved, these resistors were not excessively large. Tuning was realized with tunable (junction) capacitances. The automatic tuning system was based on a tunable reference master filter in stead of a tunable reference oscillator. Both types of reference circuits have advantages of their own and are still in use.
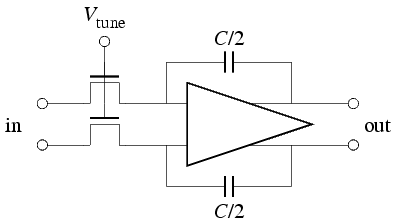
Further developments mainly concerned the realization of tunable integrators. In 1982, Johannes O. Voorman realized tunability via a Gilbert gain cell [23]. In 1983, Mihai Banu and Yannis P. Tsividis introduced the MOSFET-C integrator [24], depicted in Figure 6.
This integrator is a standard RC -type integrator, where the resistors have been replaced by MOSFET's. These act as tunable resistors, so that the problems in connection with tunability and large resistors are solved. In 1985, Pennock proposed the use of a gate-driven MOSFET in the triode region [25].Since then, different types of integratable tunable integrators have been proposed, and integrated filters have been realized with these. A breakthrough in high-frequency filtering is due to Bram Nauta, who proposed a transadmittance-based integrator [26] with which 100MHz filters can be designed, with accurate transfer functions up to 400MHz [27,28] in a process that would normally only allow operation in the low MHz region.