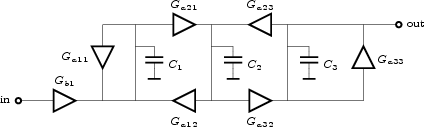
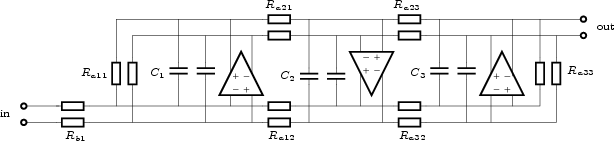
Figure 3 shows an active realization of a third-order ladder
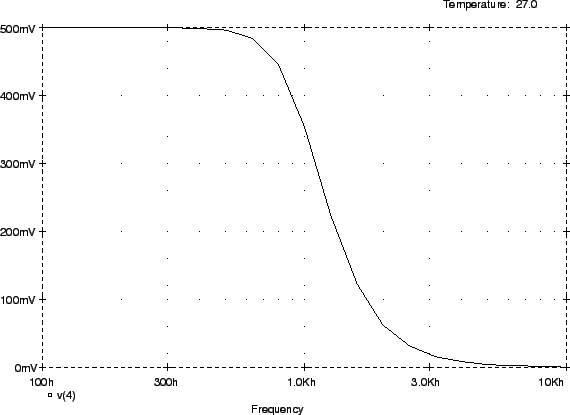
filter. The filter consists of a network of transadmittance stages and capacitors. With C1 = C2 = C3 = 100pF , Gb1 = 6.283⋅10-7 A/V, Ga11 = Ga33 = - 6.283⋅10-7 A/V, Ga21 = Ga32 = - 4.443⋅10-7 A/V and Ga12 = Ga23 = 4.443⋅10-7 A/V the filter is a Butterworth type lowpass filter with a cutoff frequency of 1kHz. Figure 4 shows the results of a SPICE transfer-function analysis of the circuit.
The capacitors in the filter act as integrators, and the voltages
on the capacitors are the output voltages of these integrators.
These voltages form the state variables xi
of the filter.
Let xi
designate the voltage
over Ci
. It is not difficult to derive the network equations in terms
of the state variables:
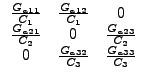
| sC1x1 | = | Ga11x1 + Ga21x2 + Gb1Vin | (1) |
| sC2x2 | = | Ga21x1 + Ga23x3 | (2) |
| sC3x3 | = | Ga32x2 + Ga33x3 | (3) |
| Vout | = | x3, | (4) |
then the network equations become
| sX | = | AX + BVin | (5) |
| Vout | = | CX + DVin | (6) |
|
(7) |
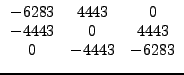
input : order = 3; A = -6283 4443 0 -4443 0 4443 0 -4443 -6283 ; B = 6283 0 0 ; C = 0 0 1 ; ;The order of the filter must be specified first. Then the state matrices appear, in the order A , B , C , D . The input command as well as the matrix specifications each require a semicolon as termination character. The specification of D is optional. If there is no specification for D (as in this example) it receives a value of zero.
There are several ways to realize the filter network structure as described by matrices (8). One of these realizations is the filter of Figure 3. An alternative realization as an opamp-R-C filter is in Figure 5.
If the capacitor values are the same as in Figure 3, and the resistor values are the absolute values of the reciprocal values of the corresponding transadmittances, both examples will have the same state-space representation and transfer function.Figure 6 shows a signal-flow diagram depicting the state-space model of the example filters of this section.
If a user specifies a filter transfer function, FA will determine a network
that realizes this transfer function and store the network in the state-space
format. FA will show the state matrices if the user enters the command
output: filter;. For instance, the input specification
chebyshev(4,0.1); output: filter;results in the following.
(4, 4) -6.377299e-01 4.650002e-01 0.000000e+00 0.000000e+00 -4.650002e-01 -6.377299e-01 0.000000e+00 0.000000e+00 -0.000000e+00 -1.184767e+00 -2.641564e-01 1.122610e+00 0.000000e+00 0.000000e+00 -1.122610e+00 -2.641564e-01 B = (4, 1) -1.339622e+00 0.000000e+00 -0.000000e+00 0.000000e+00 C = (1, 4) 0.000000e+00 0.000000e+00 0.000000e+00 1.000000e+00 D = 0.000000e+00

![\begin{figure}%\setlength{\unitlength}{1mm}
\begin{center}
\begin{picture}(80...
... \put(70,20){\makebox(0,0)[l]{$a_{33}$}}
\end{picture}\end{center}
\end{figure}](img23.png)